ကျွန်ုပ်တို့၏ထုတ်ကုန်များ သို့မဟုတ် စျေးနှုန်းစာရင်းနှင့်ပတ်သက်၍ စုံစမ်းမေးမြန်းလိုပါက သင့်အီးမေးလ်ကို ကျွန်ုပ်တို့ထံ ထားခဲ့ပါ၊ ကျွန်ုပ်တို့သည် 24 နာရီအတွင်း ဆက်သွယ်ပေးပါမည်။
")
")
")



ဤစနစ်သည် ဟိုက်ဒရောလစ်မောင်းနှင်မှု၊ ဖိအားနှင့် နေရာရွှေ့ပြောင်းမှုအပိတ်-စက်ဝိုင်း အလိုအလျောက်ထိန်းချုပ်မှုမုဒ်ကို အသုံးပြု၍ အချက်ပေါင်းများစွာ ထိန်းချုပ်မှုကို သိရှိရန်၊ အဝေးပြေးတံတား ရော်ဘာဝက်ဝံများကို အစားထိုးခြင်း၊ မြေပေါ်တင်ခြင်း၊ ကုန်းတွင်းမြစ်ကူးတံတားကို တပြိုင်တည်း ရုတ်သိမ်းခြင်း၊ စက်ပစ္စည်းများ ရုတ်သိမ်းခြင်းနှင့် ပြုပြင်ခြင်း စသည်တို့တွင် အသုံးများသည်။
System Composition နှင့် Main Principle
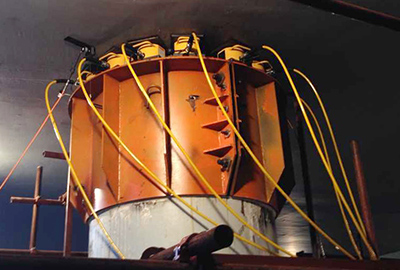
ဤစနစ်တွင် ဖိအားမြင့်ပန့်စခန်း 1 ခု၊ ထိန်းချုပ်အဆို့ရှင်အုပ်စုများ၊ ဟိုက်ဒရောလစ်ဆလင်ဒါများ၊ လေဖြတ်ခြင်းစောင့်ကြည့်ကိရိယာများ၊ ဖိအားစောင့်ကြည့်ကိရိယာများနှင့် လျှပ်စစ်ထိန်းချုပ်မှုစနစ် 1 စုံတို့ ပါဝင်သည်။ Hydraulic pump station သည် output flow ၏ ရည်ရွယ်ချက်အောင်မြင်ပြီး စဉ်ဆက်မပြတ် ထိန်းညှိနိုင်သော စီးဆင်းမှုကို ပြောင်းလဲရန် switch frequency ကို ထိန်းညှိမှုပေါ် မူတည်၍ အဖွင့်-အပိတ် valve ဖြင့် စီးဆင်းမှုကို ထိန်းချုပ်ပါသည်။ အလေးချိန်လုပ်ငန်းစဉ်တွင် ဟိုက်ဒရောလစ်ဆလင်ဒါတစ်ခုစီ၏ ထပ်တူပြုမှုအပေါ် တိကျသောထိန်းချုပ်မှုအား သင့်လျော်သောလျှပ်စစ်ထိန်းချုပ်ကိရိယာနှင့် ကိုက်ညီမှု၊ ဖိအားနှင့် ရွေ့ပြောင်းမှုအပိတ်ကွင်းပိတ်ထိန်းချုပ်မှုတို့ကို ပေါင်းစပ်ခြင်းဖြင့် အောင်မြင်နိုင်သည်။
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
ရွှေ့ပြောင်းခြင်းစင့်ခ်အချိန်တိကျမှု- ≦±0.5mm ပါဝါထောက်ပံ့မှု- AC380V/50Hz (3 အဆင့်) Max။ အလုပ်ဖိအား- 700Bar ထိန်းချုပ်မှုမုဒ်- Pulse-Width-Modulation လည်ပတ်မှု အင်တာဖေ့စ်- လူသား-ကွန်ပြူတာ အင်တာဖေ့စ် နှိုးဆော်စက်- အချက်ပြမီး
ဖွဲ့စည်းပုံဖော်ပြချက်များ
လက်ကျန်အဆို့ရှင်များ တပ်ဆင်ထားသော Plunger ဟိုက်ဒရောလစ်ပန့်၊ ရုတ်သိမ်းခြင်းနှင့် နှိမ့်ချသည့်အခါ ဆီရယူသည့်အမြန်နှုန်းထိန်းချုပ်မှုတွင် ဟိုက်ဒရောလစ်ဆလင်ဒါများကို အာမခံချက်၊ synchronous တိကျမှုအပေါ် ဟိုက်ဒရောလစ်သက်ရောက်မှုကို သက်သာစေသည်၊ ယိုစိမ့်မှုမရှိဘဲ ဟိုက်ဒရောလစ်ဆလင်ဒါများကို သော့ခတ်နိုင်ပြီး ဟိုက်ဒရောလစ်ဆလင်ဒါများ လွတ်လပ်စွာပြုတ်ကျမည်မဟုတ်ကြောင်း သေချာပါစေ။ မတော်တဆ ပါဝါချို့ယွင်းမှုနှင့် ဟိုက်ဒရောလစ်ဆလင်ဒါ၏ ဝန်ကို ထိန်းမနိုင်သိမ်းမရ ဖြစ်စေသည်။ ဤစနစ်တွင် ဖိအား transducer နှင့် displacement sensor လည်း တပ်ဆင်ထားသည်။ ဟိုက်ဒရောလစ်ဆလင်ဒါကို ရုတ်သိမ်းသည့်အခါ ဖိအားထောက်လှမ်းသည့်ကိရိယာသည် ဝန်အလေးချိန်ကို အချိန်နှင့်တပြေးညီ စောင့်ကြည့်နိုင်သည်။ တစ်ချိန်တည်းမှာပင်၊ ရွှေ့ပြောင်းမှု ထောက်လှမ်းသည့်ကိရိယာသည် ဟိုက်ဒရောလစ်ဆလင်ဒါများ၏ အမြင့်ကို အချိန်နှင့်တပြေးညီ တိုင်းတာနိုင်သည်။
လျှပ်စစ်ထိန်းချုပ်မှုစနစ်၏ဝိသေသလက္ခဏာများသည်အဓိကအားဖြင့် SIEMENS PLC ထိန်းချုပ်ကိရိယာဖြင့်ဖွဲ့စည်းထားပြီး၊ ဆလင်ဒါတစ်ခုစီ၏ဖိအားအာရုံခံကိရိယာနှင့်ဆလင်ဒါတစ်ခုစီ၏ရွေ့လျားမှုအာရုံခံကိရိယာဖြင့်စောင့်ကြည့်ရန်အတွက် PLC သို့ signal ကိုပေးပို့သည်။ မာစတာထိန်းချုပ်ရေးဌာန၊ မောင်းနှင်မှုအဆို့ရှင်အုပ်စု၊ သက်ဆိုင်ရာ ဟိုက်ဒရောလစ်ဆလင်ဒါကို ရုတ်သိမ်းရန် သို့မဟုတ် လျှော့ချရန် ပေးပို့သော ညွှန်ကြားချက်အရ အထွက်ဖိအားဆီ။ တွေ့ရှိသောဖိအားတန်ဖိုးနှင့် နေရာရွှေ့ပြောင်းမှုတန်ဖိုးအရ PLC သည် နေရာရွှေ့ပြောင်းမှုအမှားကို စဉ်ဆက်မပြတ် ပြုပြင်ပြီး ဝန်တစ်ခုစီ၏ ထပ်တူပြုမှုကို ထိန်းသိမ်းထားသည်။
| မော်ဒယ် | အမှတ်များ | synchronous တိကျမှု | မော်တော်ပါဝါ | ဓာတ်အား | အလုပ်ဖိအား | စီးဆင်းမှု | ဆီတိုင်ကီစွမ်းရည် | အလေးချိန် | အတိုင်းအတာများ |
| (မီလီမီတာ) | (KW) | (AC/V) | (MPa) | (ဌ) | (ဌ) | (ကီလိုဂရမ်) | (မီလီမီတာ) | ||
| KET-DMTB-4 | အချက် ၄ ချက်ကို ထပ်တူပြုခြင်း။ | ≤±0.5 | ၂.၂ | ၃၈၀ | 70 | 2 | ၁၃၀ | ၂၂၀ | 760×870×1210 |
| KET-DMTB-8 | ၈ ချက်ကို ထပ်တူပြုခြင်း။ | ≤±0.5 | ၂.၂ | ၃၈၀ | 70 | 2 | ၁၃၀ | ၂၄၀ | 760×870×1210 |
| KET-DMTB-12 | 12 ချက်ကို ထပ်တူပြုခြင်း။ | ≤±0.5 | ၂.၂ | ၃၈၀ | 70 | 2 | ၁၃၀ | ၂၆၀ | 760×870×1210 |
| KET-DMTB-16 | 16 ချက်ကို ထပ်တူပြုခြင်း။ | ≤±0.5 | ၂.၂ | ၃၈၀ | 70 | 2 | ၂၀၀ | ၃၈၀ | 1100×960×1130 |
| KET-DMTB-24 | 24 ချက်ကို ထပ်တူပြုခြင်း။ | ≤±0.5 | ၂.၂ | ၃၈၀ | 70 | 2 | ၂၀၀ | ၄၃၂ | 1100×960×1130 |
 |  |  |
| ရော်ဘာဝက်ဝံများကို 24 မှတ်တစ်ပြိုင်တည်းရုတ်သိမ်းခြင်းဖြင့် အစားထိုးခြင်း။ | အဝေးပြေးတံတားများအတွက် တပြိုင်နက် ရုတ်သိမ်းခြင်းဖြင့် ရော်ဘာဝက်ဝံများကို အစားထိုးခြင်း။ | တံတားများအတွက် synchronous lifting ဖြင့် ရော်ဘာဝက်ဝံများကို အစားထိုးခြင်း။ |
 |  |  |
| viaduct အတွက် synchronous lifting ဖြင့် ရော်ဘာဝက်ဝံများကို အစားထိုးခြင်း။ | အကွက်ငါးခုပါရှိသော ခါးစည်းတည်ဆောက်မှုအတွက် ချိန်ကိုက် ရုတ်သိမ်းခြင်းဖြင့် ရော်ဘာဝက်ဝံများကို အစားထိုးခြင်း | Box girder basin-type support အတွက် ရော်ဘာဝက်ဝံများကို အစားထိုးခြင်း။ |
| ဖိုင်နာမည် | ပုံစံ | ဘာသာစကား | ဖိုင်ကိုဒေါင်းလုဒ်လုပ်ပါ။ |
|---|