
xx အဝေးပြေးလမ်းမကြီးပေါ်ရှိ Zhongtang တံတားသည် ပင်မအလျား 32.5 + 4 × 45 + 32.5 မီတာ ရှိပြီး အညီအမျှ အပိုင်းသည် ဖိသိပ်ထားသော အားဖြည့်ကွန်ကရစ် စဉ်ဆက်မပြတ် ဘောက်စ်ခါးပတ် (လွန်တင်းမာမှုနည်း) စုစုပေါင်း အရှည် 245.9 မီတာ ရှိသည်။ Box girder သည် တစ်ခန်းတည်းဖြစ်ပြီး အလယ်ဗဟိုတွင် အလင်းတန်းအမြင့်မှာ 308.25cm၊ အမိုးအကျယ် 1100cm (တံတားကြမ်းပြင်အကျယ် 12m) နှင့် အောက်ခြေ plate width 480cm ဖြစ်ပါသည်။ ဝဘ်သည် တိမ်းစောင်းနေပြီး ထိပ်ပြားရှိ အလယ်အကွာအဝေးသည် 570 စင်တီမီတာဖြစ်သည်။ အလင်းတန်းအဆုံးနှင့် အလင်းတန်းတစ်ခုလုံး၏ အလယ်ကို အလင်းတန်းများဖြင့် ပံ့ပိုးပေးထားပြီး ကျန်အားလုံးကို 15 မီတာတိုင်း အမြှေးပါးများဖြင့် ပံ့ပိုးပေးပါသည်။
ပင်မတံတား၏ ဆိပ်ခံအုတ်မြစ်သည် အချင်း 120 စင်တီမီတာရှိသော အချင်း 120 စင်တီမီတာရှိသော အုတ်ခုံလေးခုဖြစ်ပြီး အုတ်ခုံတွင် 50 စင်တီမီတာထက်ပို၍ မြှုပ်နှံထားသည်။ ဆိပ်ခံကိုယ်ထည်သည် အချင်း 180 စင်တီမီတာရှိသော အားဖြည့်ကွန်ကရစ်၏ နှစ်ထပ်ကော်လံပုံစံကို လက်ခံသည်။
တံတားတည်ဆောက်သည့်အခါ၊ SSY နည်းလမ်းကို အသုံးပြုသည်၊ ဆိုလိုသည်မှာ အလင်းတန်းကို စိုက်ထူရန် Multi-point pushing method ကို အသုံးပြုသည်။ ဤနည်းလမ်း၏ ဝိသေသလက္ခဏာများမှာ- အလင်းတန်းအား တွန်းထုတ်သောအခါ အလျားလိုက် တုံ့ပြန်မှုစွမ်းအားသည် ပြန့်ကျဲသွားပြီး ဆိပ်ခံတစ်ခုစီတွင် သက်ရောက်မှုရှိပြီး တွန်းခြင်း (ဆွဲခြင်း) လုပ်ဆောင်ချက်ကို ဗဟိုမှ ထိန်းချုပ်နိုင်သည်။ အလုပ်ချိန်အတွင်း ယာယီဆိပ်ခံတံတားများ မရှိသောကြောင့်၊ ဘောက်စ်ခါးပတ်၏ ရှေ့ဘက်စွန်းသည် မီတာ 30 အရှည်ရှိသော သံမဏိနှောင်ကြိုးကို လမ်းညွှန်အလင်းတန်းအဖြစ် ချိတ်ဆက်ထားသည်။
အဆင်သင့်လုပ်ထားသော သေတ္တာခါးပတ်ကို တွန်းလိုက်သောအခါ၊ မြှင့်တင်ခြင်း → အလင်းတန်း → လွှတ်တင်ခြင်း အလင်းတန်း → တွန်းကန်ခြင်းဆိုင်ရာ လုပ်ထုံးလုပ်နည်းများအတိုင်း လည်ပတ်သည်။ ပုံ 1 သည် စက်ဝန်းတစ်ခု၏ဖြစ်ရပ်ကို ပြသည်။
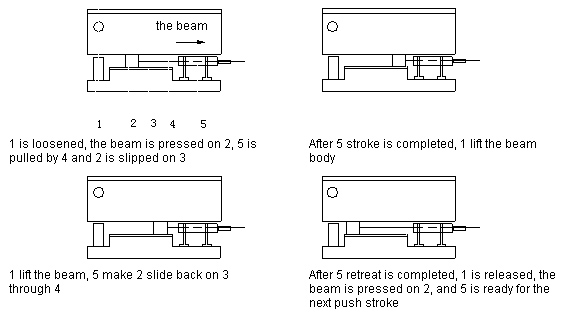
ဒိုက်ထိုးလုပ်ထုံးလုပ်နည်း ပုံကြမ်း
1—ဒေါင်လိုက် ဆလင်ဒါ့2——ခေါင်းကိုဆွဲပါ။့3—Sလမ်းဘေး့4—Pulling Rod့5—Hအလျားလိုက် ဆလင်ဒါ
ဤပရိုဂရမ်စက်ဝန်းကို သိရှိရန်၊ အလျားလိုက်ဆလင်ဒါသည် လျှောစက်မှတစ်ဆင့် ဘောက်စ်ခါးပတ်ကို တွန်းထုတ်သည့် လုပ်ဆောင်ချက်ကို ပြီးမြောက်စေပြီး ဒေါင်လိုက်ဆလင်ဒါသည် အလင်းတန်းကို ရုတ်သိမ်းခြင်းနှင့် လွှတ်ချခြင်းတို့ကို ပြီးမြောက်စေကြောင်း တွေ့မြင်နိုင်သည်။ ဆိုလိုသည်မှာ၊ အလျားလိုက်ဆလင်ဒါနှင့် ဒေါင်လိုက်ဆလင်ဒါသည် အလှည့်ကျလုပ်ဆောင်သည်။

1. Multi-point pusher beam ၏ ဟိုက်ဒရောလစ်စနစ်နှင့် ၎င်း၏ထိန်းချုပ်မှု
အလျားလိုက် ဆလင်ဒါ နှင့် ဒေါင်လိုက် ဆလင်ဒါ နှစ်ခုလုံးကို ဟိုက်ဒရောလစ်ဖြင့် မောင်းနှင်ပြီး လျှပ်စစ်ဖြင့် ထိန်းချုပ်ထားသည်။ တံတားအတွက် တွန်းရမည့် ခါးပတ်အရှည်မှာ 225 မီတာ ရှိပြီး linear meter တစ်ခုစီသည် 16.8t အလေးချိန်ရှိပြီး စုစုပေါင်း အလေးချိန် 3770t ရှိသည်။ ထို့ကြောင့် စုစုပေါင်း အလျားလိုက် ဆလင်ဒါ ၁၀ လုံးနှင့် ဒေါင်လိုက် ဆလင်ဒါ ၂၄ လုံး (ဆီဖိအား 320kg/cm2 ဖြစ်ပြီး အထွက် 250t) ကို စီစဉ်ပေးပါသည်။ အလျားလိုက် ဆလင်ဒါများပါသော ဆိပ်ခံ ၅ ခုရှိပြီး ဆိပ်ခံတစ်ခုစီအတွက် ၂ ခု၊ ဒေါင်လိုက်ဆလင်ဒါများအတွက် ဆိပ်ခံ ၆ ခု၊ ဆိပ်ခံတစ်ခုစီအတွက် ၄ ခုရှိသည်။
ဒေါင်လိုက်ပေါက်သည် အလင်းတန်းကို ရုတ်သိမ်းခြင်းနှင့် လျှော့ချခြင်းတို့ကို ပြီးမြောက်စေသည်။ တည်ဆောက်ရေးလုပ်ငန်းစဉ်တွင် တံတားတစ်ခုလုံးကို တပြိုင်တည်းလုပ်ဆောင်ရန် မလိုအပ်ဘဲ ဆိပ်ခံတံတားများကို ပိုင်းခြားရန် လိုအပ်သောကြောင့် ဗဟိုချုပ်ကိုင်မှု ပြဿနာမရှိပေ။ ၎င်း၏လျှပ်စစ်ထိန်းချုပ်မှုသည် ဂျိုက်ကို စဉ်ဆက်မပြတ် ရုတ်သိမ်းခြင်း သို့မဟုတ် လျှော့ချခြင်းတို့ကို ပြီးမြောက်စေပြီး ပြေးလွှားခြင်းပုံစံကိုလည်း ပြီးမြောက်စေနိုင်သည်။
အလျားလိုက်အပေါက်သည် အလင်းတွန်းခြင်းလုပ်ဆောင်ချက်ကို ပြီးမြောက်စေသည်။ တည်ဆောက်မှုလုပ်ငန်းစဉ်သည် တံတားတစ်ခုလုံးကို တစ်ပြိုင်တည်းထွက်ရန် သို့မဟုတ် ရပ်တန့်ရန် လိုအပ်သည်၊ ထို့ကြောင့် အလျားလိုက်ဂျိုက်၏ ဗဟိုထိန်းချုပ်မှုကို တပ်ဆင်ထားပြီး ယင်းရည်ရွယ်ချက်အတွက် ဗဟိုချုပ်ကိုင်မှုလျှပ်စစ်သေတ္တာကို တည်ဆောက်ထားသည်။
အလျားလိုက် Jack များနှင့် ဒေါင်လိုက် Jack များကို အသုံးပြုမှု တဖြည်းဖြည်း တိုးလာပြီး Box girder ကို စက်ဝိုင်းတစ်ခုလျှင် 15m ဖြင့် ကြိုတင်ပြင်ဆင်ထားသည်။ box girder ၏အဆက်မပြတ်ကြီးထွားလာသည်နှင့်အမျှ၊ အသုံးပြုသော jack အရေအတွက်သည် တဖြည်းဖြည်းတိုးလာသည်။ ကြိုတင်ပြင်ဆင်မှု၏နောက်ဆုံးစက်ဝန်းအနည်းငယ်တွင်၊ အလျားလိုက် ဂျက်ကွက် 10 တွဲနှင့် ဒေါင်လိုက်ပေါက် 24 ခုစလုံးကို အသုံးပြုထားသည်။
ဆိပ်ခံတစ်ခုစီကို ဗဟိုထိန်းချုပ်မှုအခန်းနှင့် ချိတ်ဆက်ရန်အတွက်၊ ကျွန်ုပ်တို့သည် အင်တာကွန် အသံထုတ်လွှင့်မှုစနစ်ကို တပ်ဆင်ခဲ့သည်။ အထက်တွင်ဖော်ပြထားသော ဟိုက်ဒရောလစ် ဂီယာစနစ်နှင့် ထိန်းချုပ်မှုနည်းလမ်းများကို အသုံးပြုရန် ယုံကြည်စိတ်ချရကြောင်း လက်တွေ့ သက်သေပြခဲ့သည်။
အကိုးအကားအတွက် push frame beam method ၏ ဟိုက်ဒရောလစ်ပို့လွှတ်ခြင်းဆိုင်ရာ ပြဿနာပေါင်းများစွာ၏ အတွေ့အကြုံအချို့အကြောင်း ဆွေးနွေးကြပါစို့။
1. ဟိုက်ဒရောလစ်စနစ်၏အဆင့်သတ်မှတ်ထားသောဖိအားစည်းမျဉ်းပြဿနာ။ box girder ရွေ့သွားသောအခါ static friction resistance နှင့် dynamic friction resistance တို့ကို ကွဲပြားစွာ ထည့်သွင်းစဉ်းစားခြင်းကြောင့် အဆင့်ဆင့် ဖိအားထိန်းညှိခြင်း၏ ပြဿနာကို ရှေ့တန်းတင်ပါသည်။ ယခင်က၊ ဟိုက်ဒရောလစ်စနစ်တွင် ဆီဖိအား နှစ်ခု သို့မဟုတ် သုံးခု ရှိသင့်သည်ဟု အမြဲယုံကြည်ခဲ့ကြသည်- တည်ငြိမ်သော ပွတ်တိုက်မှု ခုခံမှုကို ကျော်လွှားသောအခါ ပိုမိုကြီးမားသော ဆီဖိအားကို အသုံးပြုသည်။ box beam လျှောကျလာသောအခါတွင် ပိုမိုသေးငယ်သော ဆီဖိအားကို အသုံးပြုသည်။ နည်းလမ်းမှာ သတ်မှတ်ထားသော မတူညီသော relief valves များကို ချိတ်ဆက်ခြင်းဖြင့် ဟိုက်ဒရောလစ်စနစ်ကို ပြောင်းလဲရန်ဖြစ်သည်။ ဤနည်းအားဖြင့် ဟိုက်ဒရောလစ်စနစ်နှင့် ၎င်း၏ထိန်းချုပ်မှုမှာ အနည်းငယ်ပိုမိုရှုပ်ထွေးပါသည်။ ကျွန်ုပ်တို့၏အလေ့အကျင့်သည် ဟိုက်ဒရောလစ်စနစ်၏ဆီဖိအားသည် သူ့အလိုလိုပေါ်မမူတည်ဘဲ jack ၏ပြင်ပခံနိုင်ရည်အပေါ်တွင် သက်သေပြခဲ့သည်။ ဆိုလိုသည်မှာ ဟိုက်ဒရောလစ်စနစ် အလုပ်လုပ်နေချိန်တွင် ဆီပန့်၏ နံမည်ပေါ်ရှိ ပမာဏဖြင့် ၎င်း၏ဆီဖိအားကို မဆုံးဖြတ်ဘဲ ပန့်မှထွက်ခွာပြီးနောက် ဆီတိုင်ကီသို့ ဆီစီးဆင်းမှုအတွင်း ကြုံတွေ့ရသည့် စုစုပေါင်းခံနိုင်ရည်ဖြင့်၊ . jack သည် ခံနိုင်ရည် (load) မရှိပါက၊ ဆီပန့်၏ ဖိအားကို ပိုက်လိုင်း၏ ခံနိုင်ရည်ဖြင့်သာ ဆုံးဖြတ်သည်၊ ဆီပန့်မှဆီသည် လေထုထဲသို့ ချက်ခြင်း သို့မဟုတ် ဆီတိုင်ကီထဲသို့ ဝင်လာပါက ဆီပန့်၏ ဖိအားသည် သုညဖြစ်လိမ့်မည်။ jack ၏ resistance (load) R တိုးလာပါက ဆီပန့်၏ ဖိအားလည်း တိုးလာပါသည်။ jack ကိုချွတ်သောအခါ၊ ဆီပန့်၏ဖိအားကို one-way valve မှဆုံးဖြတ်သည်၊ jack အားသွင်းသောအခါ၊ ဆီပန့်၏ဖိအား၊ ဆိုလိုသည်မှာ၊ စနစ်၏ဆီဖိအား၊ jack ၏ခံနိုင်ရည်အားဖြင့်ဆုံးဖြတ်လိမ့်မည်။ အလုပ်တွင် ဆီဖိအားကို jack load ဖြင့် ဆုံးဖြတ်သည်။ ဆိုလိုသည်မှာ ဟိုက်ဒရောလစ်စနစ်၏ ဆီဖိအားသည် ပြင်ပခုခံမှုနှင့်အတူ သူ့အလိုလို ပြောင်းလဲသွားလိမ့်မည်၊ ထို့ကြောင့် တစ်ဆင့်ပြီးတစ်ဆင့် ဖိအားထိန်းညှိရန် မလိုအပ်ပါ။

2. အလျားလိုက် jacks များ၏ ပြဿနာကို စင့်ခ်လုပ်ပါ။ တွန်းခြင်းလုပ်ငန်းစဉ်တွင် ဘယ်နှင့်ညာ အလျားလိုက်အပေါက်များသည် အလင်းတန်းအား တူညီသောအမြန်နှုန်းဖြင့် ရှေ့သို့တွန်းသင့်သည်၊ သို့မဟုတ်ပါက အလင်းတန်းသည် ချော်သွားသည့်အခါ ဘက်ပြန်သွားမည်ဖြစ်သည်။ ဟုတ်ပါတယ်၊ လူတွေစဉ်းစားတာက ပထမဆုံးအချက်က beam body ကို ဘယ်ညာ အလျားလိုက် jacks တွေက သက်ရောက်တဲ့ force ဟာ ညီတူညီမျှ ဖြစ်သင့်တယ်၊ beam body ၏ ဘယ်ညာ symmetry သည် ကောင်းမွန်ပြီး ခံနိုင်ရည်အား ဘယ်ညာနှင့် ညီမျှသောအခါ၊ ဟုတ်ပါတယ်၊ ဘယ်နှင့်ညာ အလျားလိုက် jacks များမှ သက်ရောက်သော force သည်လည်း တူညီသင့်ပါသည်။ ဒုတိယစဉ်းစားချက်မှာ ရှေ့သို့ဘယ်နှင့်ညာအမြန်နှုန်းသည်လည်း တူညီသင့်သည်။ ဤနည်းအားဖြင့် အလင်းတန်းသည် ဖြောင့်ဖြောင့် ချောမွေ့စွာ လည်ပတ်နိုင်သည်။ သို့သော်၊ အပိုင်းတစ်ခုစီသည် ဘယ်နှင့်ညာတွင် အပြည့်အ၀ အချိုးညီညီဖြစ်ရန်၊ ဘယ်နှင့်ညာဘက်ရှိ ခံနိုင်ရည်မှာ တူညီမှုရှိရန် သေချာရန် ခက်ခဲသည်။ အထက်တွင်ဖော်ပြထားသောစနစ်နှင့်ဆက်စပ်သောဆီဖိအားကိုပြင်ပခုခံမှုဖြင့်ဆုံးဖြတ်သည်။ ဘယ်နှင့်ညာပေါက်များသည် မတူညီသောဆီဖိအားအခြေအနေအောက်တွင် အလုပ်လုပ်ရမည်ဟု စိတ်ကူးကြည့်နိုင်သည်၊ ထို့ကြောင့် ဘယ်နှင့်ညာပေါက်များ၏ အမြန်နှုန်းကို ယခုအချိန်တွင် တစ်ပြိုင်တည်းလုပ်ဆောင်နိုင်ပါမည်လား။ ဥပမာအားဖြင့်၊ ဆိပ်ခံတစ်ခု၏ jacks တစ်စုံသာ အလုပ်လုပ်သည်ဟု ယူဆပါသည်။ ကျွန်ုပ်တို့သည် ပန့်တစ်လုံးကို jack တစ်ခုဖြင့်သတ်မှတ်ထားသောကြောင့်၊ ၎င်းသည် speed synchronization ပြဿနာကို အလွန်ကောင်းမွန်စွာဖြေရှင်းပေးပါသည်။ ကျွန်ုပ်တို့အသုံးပြုသော ဆီပန့်သည် ပမာဏအပြုသဘောဆောင်သော ရွှေ့ပြောင်းစုပ်ပန့်ဖြစ်သောကြောင့် သီအိုရီအရ၊ ဆီပန့်မှ ဆီထွက်နှုန်းကို မည်မျှခံနိုင်ရည်ရှိစေကာမူ (ဆိုလိုသည်မှာ စနစ်၏ဆီဖိအား မည်မျှပင်မြင့်မားပါစေ) ၎င်း၏ စီးဆင်းနှုန်းမှာ၊ မပြောင်းလဲ။ ထို့ကြောင့်၊ ဘယ်နှင့်ညာ အပေါက်များကို ထပ်တူပြုရပါမည်။ ထိပ်လေးခုပါသည့် ဆိပ်ခံနှစ်ခု၊ ထိပ်ခြောက်ခုပါသည့် ဆိပ်ခံ ၃ စင်း၊ ထိပ်ရှစ်ခုပါသည့် လေးစင်း သို့မဟုတ် ထိပ်ဆယ်ခုပါသည့် ဆိပ်ခံငါးစင်း၏ အခြေအနေကိုလည်း ကောက်ချက်ချနိုင်သည်။ ထို့ကြောင့်၊ ကျွန်ုပ်တို့၏ ပန့်တစ်ခုနှင့် ထိပ်တစ်ခု၏ နည်းလမ်းသည် ဘယ်နှင့် ညာဘက် ထပ်တူပြုခြင်း၏ ပြဿနာကို ကောင်းစွာ သဘောပေါက်နိုင်မည်ဖြစ်သည်။ Push beam တွင်၊ box beam ၏ အလယ်မျဉ်းသည် အခြေခံအားဖြင့် offset မဟုတ်ကြောင်း သက်သေပြခဲ့သည် (အတိအကျပြောရလျှင်၊ ၎င်းကို ဘယ်မှညာသို့ အနည်းငယ် offset ဖြစ်သင့်သော်လည်း အချို့သော range အတွင်းတွင် အမြဲထားရှိနိုင်သည်)။ တည်ဆောက်မှုလုပ်ငန်းစဉ်သည် ဗဟိုမျဉ်း၏သွေဖည်မှုကို အနီးကပ်စောင့်ကြည့်ရန် လိုအပ်သည်။ 2 စင်တီမီတာထက်ကျော်လွန်ပါက၊ (ဘေးတိုက်လမ်းညွှန်မှုဖြင့်) ပြုပြင်ရန်လိုအပ်သည်။ push-up လုပ်ငန်းစဉ်အတွင်း၊ ပြုပြင်မှုအရေအတွက်သည် အလွန်နည်းပါးပါသည်။ အကြိမ်သုံးဆယ်တွင် တစ်ကြိမ် သို့မဟုတ် နှစ်ကြိမ်သာ (15m box girder)။ အကြောင်းရင်းများစွာ၏ ပေါင်းစပ်ရလဒ်အဖြစ် ယူဆနိုင်သည်၊ အကြောင်းမှာ ဟိုက်ဒရောလစ် စက်ပစ္စည်းနှင့်ပတ်သက်သည့် အတိုင်းအတာအထိ၊ ဆီပန့်တွင် စီးဆင်းမှုအမှားအယွင်းရှိပြီး ဂျိုက်တွင် အတွင်းပိုင်းယိုစိမ့်မှုပြဿနာများရှိသည် (ဂျိုက်တစ်ခုစီသည် ကွဲပြားပြီး ပစ္စတင်သည် မတူညီသော အနေအထားတွင် ရှိနေနိုင်သည်။ ) နှင့် အထက်တွင်ကျွန်ုပ်တို့၏နိဂုံးချုပ်ချက်နှင့် ဆန့်ကျင်ဘက်မဟုတ်သော အတွင်းရှိ အခြားစက်ပစ္စည်းများ၏ ယိုစိမ့်မှုစနစ်၊
3. ဒေါင်လိုက်ပေါက်များ စင့်ခ်လုပ်ခြင်း ပြဿနာ။ ကျွန်ုပ်တို့၏ဒေါင်လိုက်ဂျိုက်များသည် ဂျိုက်လေးပေါက်ပါသော ပန့်ဖြင့်အလုပ်လုပ်ပြီး တစ်ပြိုင်နက်တည်းလုပ်ဆောင်သောအဆို့ရှင်ကို တပ်ဆင်သင့်သည်၊ အကြောင်းမှာ ပေါင်းစပ်ထားသောအဆို့ရှင် (သို့မဟုတ် diverter valve) သည် မတူညီသောဝန်များ (ခုခံမှု) အောက်တွင် jack များစွာကိုပြုလုပ်နိုင်သောကြောင့် ကြိုတင်သတ်မှတ်ထားသောအချိုးအစား သို့မဟုတ် တူညီသောဆီထောက်ပံ့မှုရရှိနေသေးသောကြောင့်ဖြစ်သည်။ ထပ်တူပြုခြင်း။ သို့သော် synchronizing valve တွင် ထွက်ပေါက်နှစ်ခုသာရှိသည်ကို ထည့်သွင်းစဉ်းစားပါ။ စနစ်၏ဖွဲ့စည်းပုံကို ရိုးရှင်းစေရန်အတွက်၊ synchronization valve တပ်ဆင်ထားခြင်းမရှိပါ။ box girder ၏ဘယ်နှင့်ညာဘက်အလေးများသည် symmetrical ဖြစ်သည်ကိုထည့်သွင်းစဉ်းစားသည်၊ ထိုသို့ပြုလုပ်ရန်မှာပြဿနာကြီးမဟုတ်ပါ။ ခန့်မှန်းချက်မှန်ကန်ကြောင်း လက်တွေ့ပြသခဲ့ပြီး၊ ဒေါင်လိုက်ပေါက်သည် အခြေခံအားဖြင့် တက်လာကာ တပြိုင်နက်တည်း ပြုတ်ကျကာ အလင်းတန်းကို ရုတ်သိမ်းခြင်းနှင့် ပြုတ်ကျခြင်းတွင် ပြဿနာမရှိပါ။
စာတိုက်အချိန်- မေ ၁၆-၂၀၂၂